Cms, or compliance, is a measure of how flexible the suspension of a speaker driver is. If you’ve ever tapped on a speaker cone and noticed how easily (or not) it moves, you’ve just gotten a feel for Cms in action. It’s essentially the inverse of stiffness—a higher Cms means a more flexible suspension, while a lower Cms indicates a stiffer suspension.
How Does Cms Affect Speaker Performance?
Cms plays a critical role in determining a speaker’s resonant frequency (Fs). The relationship is simple:
- High Cms (soft suspension) → Lower Fs (good for deep bass)
- Low Cms (stiff suspension) → Higher Fs (better for midrange or high-output designs)
If you’re designing a subwoofer, you typically want higher Cms so the cone moves freely and reaches low frequencies more easily. On the other hand, PA midrange drivers often have low Cms, giving them a stiffer suspension for better control at higher frequencies.
Cms, Excursion, and Control
While a softer suspension helps a driver reach lower frequencies, it comes with trade-offs. If the suspension is too compliant, the cone may overshoot and take longer to return to rest, leading to poor transient response (i.e., sloppy bass). On the flip side, a stiff suspension keeps movement tight and controlled, but it also limits how deep the driver can go in the bass range.
This is why Cms is not just about flexibility, but about balancing flexibility with control—just like a car’s suspension. Too soft, and you’re bouncing all over the road. Too stiff, and every bump feels like a punch.
The Link Between Cms and Vas
If you’ve seen Vas (Equivalent Compliance Volume) on spec sheets, it’s directly related to Cms. Higher Cms leads to a larger Vas because a soft suspension behaves as if it’s moving a large volume of air. Likewise, a stiff suspension gives a smaller Vas.
In practical terms:
- A high Cms (large Vas) driver generally needs a big box to work properly.
- A low Cms (small Vas) driver can function well in a compact enclosure.
This is why subwoofers with soft suspensions are often found in huge cabinets—because they need that extra air volume to perform correctly.
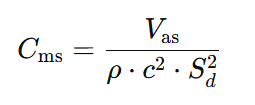
You can calculate Cms from Vas and Sd using the formula below: ρ (air density) = 1.184 kg/m³ and c (speed of sound) = 343 m/s
Cms and Speaker Longevity
A well-designed suspension must not only be flexible enough to allow movement but also durable enough to maintain its characteristics over time. Over years of use, the spider and surround—the two key suspension components—can loosen up slightly, increasing Cms and slightly lowering Fs.
This is why some people notice their subwoofers playing deeper and looser after a break-in period—because the compliance has increased slightly as the suspension softens.
Final Thoughts
Cms is one of those Thiele-Small parameters that ties into everything—excursion, Fs, Vas, and even long-term speaker performance. It’s not just about how soft or stiff the suspension is, but how well it’s balanced for the intended application. Whether you’re tuning a subwoofer for deep bass or a midrange driver for accuracy, Cms is a key factor that shapes the final result. In modern speaker designs, with high BL, the motor force can over-ride the effects of Cms in determining the box size, as usual there are trade-offs and exception with all parts of speaker design.